Skip to main content
Home
Programme
Book of Abstracts
Photo gallery
How to get there
Previous editions
Contact
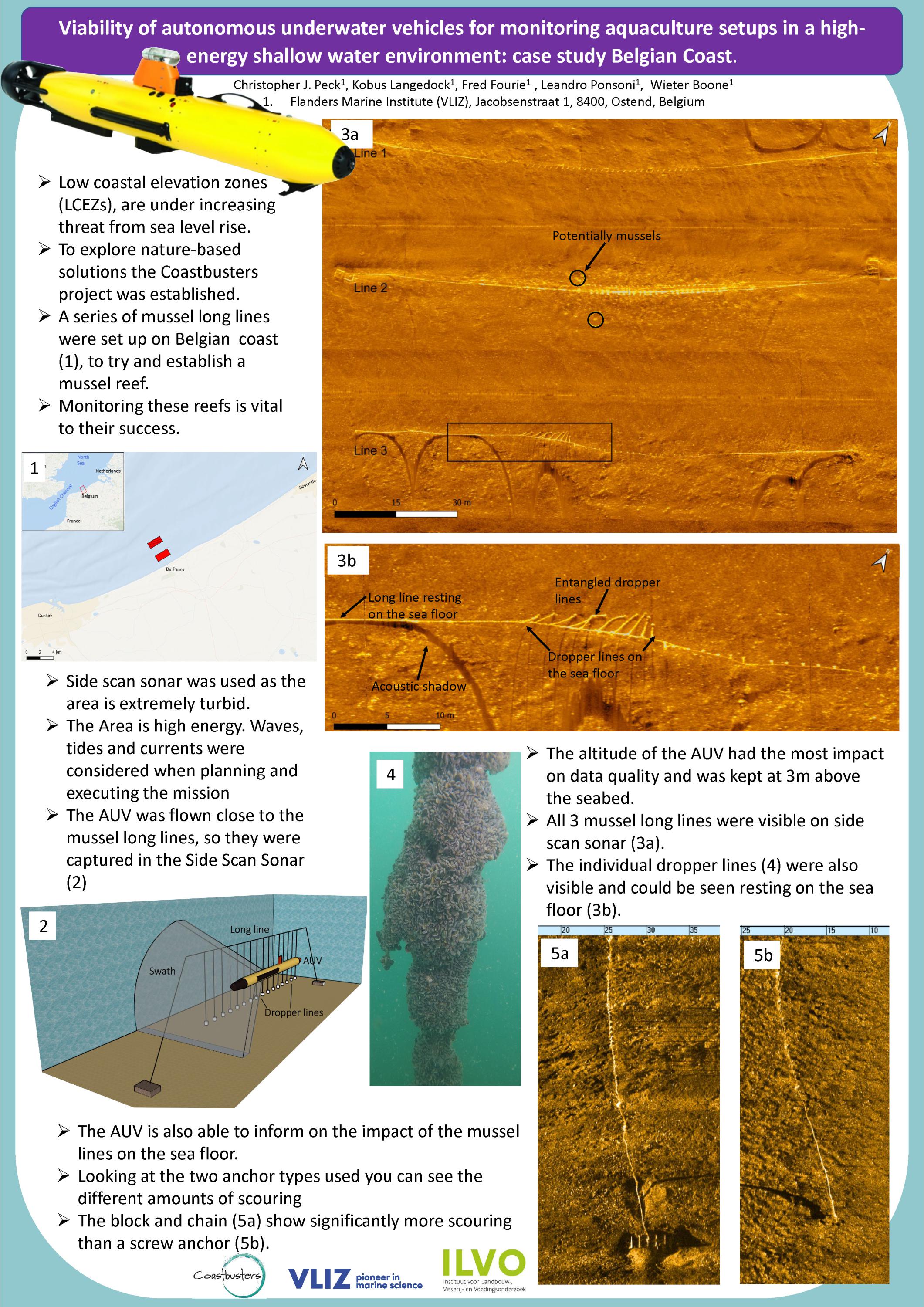
Viability of autonomous underwater vehicles for monitoring of mussel dropper lines in a high energy shallow water environment
Login to vote
view the abstract here
Submision Year
2023